Pendelwagen balancieren
Ein klassisches Problem der Regelungstechnik: Ein an einem beweglichen Wagen befestigtes Pendel soll senkrecht balanciert werden.
Unser Demonstrator zeigt die Limitation von etablierten Kontrollverfahren und die von uns entwickelte Alternative "Neural predictive control" mithilfe eines physik-informierten neuronalen Netzes.
Problemstellung
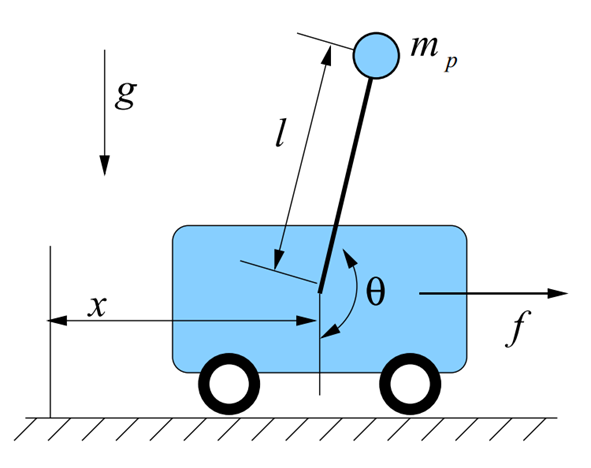
- Wagen mit Pendel kann sich nach rechts und links bewegen, nur der Wagen ist angetrieben
- Pendel startet unten, soll nach oben gebracht werden und dort balanciert werden
- Es kann zusätzlich eine externe Kraft f (z.B. Wind) wirken
- In unserem Demonstrator wirken Windkräfte zufällig und können nicht vorher gelernt werden
- Für die Methoden der Computerkontrolle steht jeweils die gleiche Hardware zur Verfügung
Videos
In den Videos werden jeweils mehrere Versuche gezeigt.
Manuelle Kontrolle:
Ein Mensch entscheidet mit Pfeiltasten (angezeigt in orange) in welche Richtung der Wagen sich bewegen soll.
Manuelle Kontrolle mit Wind
Das Problem wird erschwert durch zufällig wirkende Windkräfte (angezeigt als blaue Pfeile).
Model predictive control
Etabliertes Kontrollverfahren. Der Vergleich der Controller-Frequenz mit der Simulationsfrequenz oben links zeigt die Limitierung des Verfahrens durch begrenzte Computerressourcen.
Model predictive control mit Wind
Bei erschwertem Problem kann das etablierte Verfahren den nächsten optimalen Kontrollschritt nicht mehr rechtzeitig berechnen (die Situation hat sich schon zu sehr geändert) und stößt an seine Grenzen.
Neural predictive control
Unser neu entwickeltes Verfahren mit Kontrolle durch ein physik-informiertes neuronales Netz ist im einfachen Benchmarkproblem ähnlich gut wie MPC und dabei deutlich schneller (s. Frequenz).
Neural predictive control mit Wind
Im erschwerten Problem zeigt unser Verfahren die Vorteile gegenüber MPC deutlich, da es den Wagen auch hier zuverlässig kontrollieren kann.